Interactive Flowerbots and legobots with a bit of machine vision
I made a bunch of robots recently building on some of the ideas from libbybot and as an excuse to play with some esp32 cams that Tom introduced me to in the midst of his Gobin Frenzy.
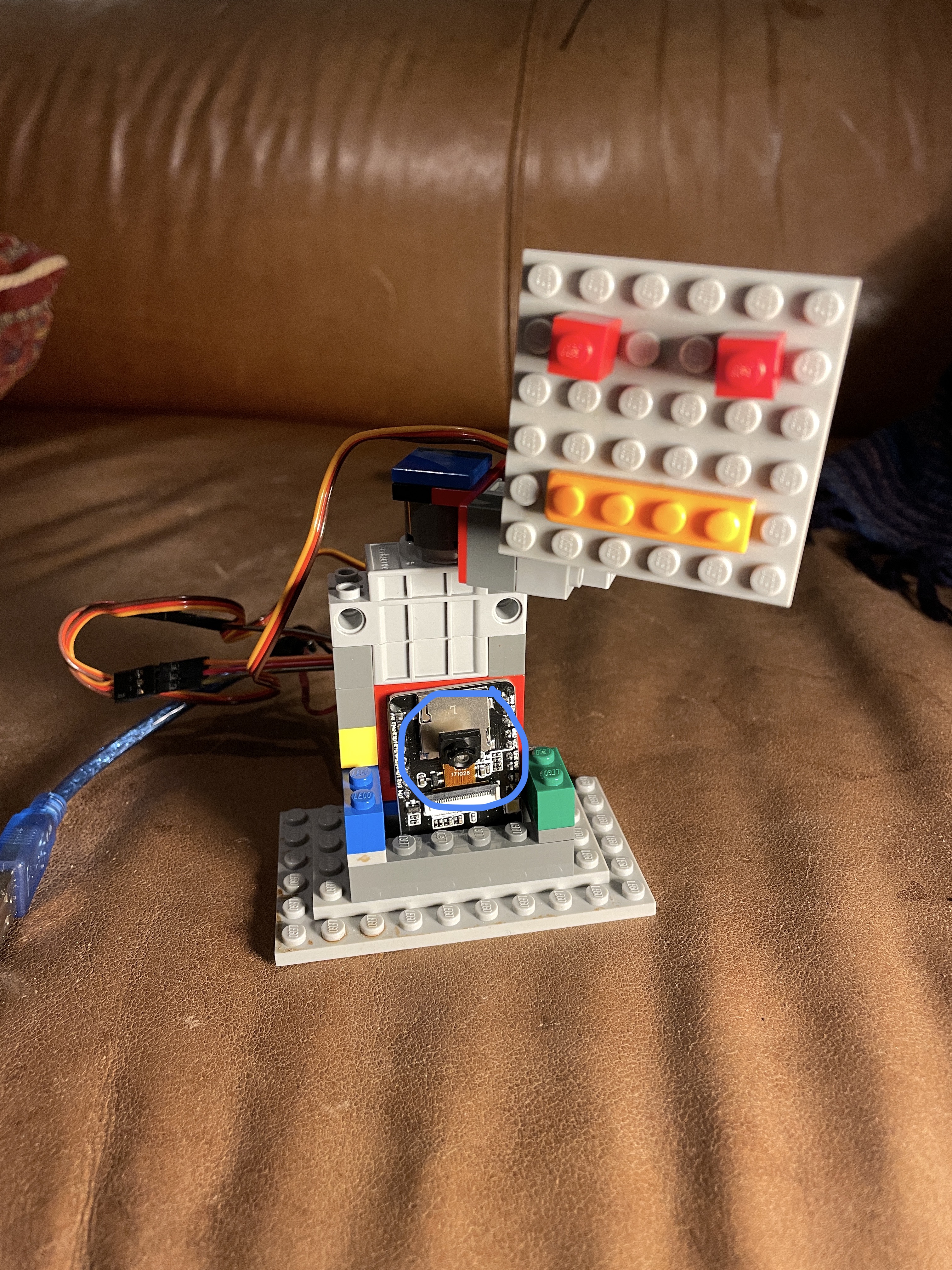
The esp32s cams are kind of amazing and very very cheap. They have a few quirks, but once you get them going it's easy to do a bit of a machine vision with them. In my case, new to this kind of thing, I used previous work by Richard to find the weight of change between two consecutive images. Dirk has since made better versions using a PID library. I made some felt-faced ones using meccano and then some lego ones using some nice lego-compatible servos from Pimoroni. Because esp32s can run their own webserver you can use websockets or mjpeg to debug them and see what they are doing.
The code's here, (here's Dirk's) and below are a few pictures. There's a couple of videos in the github repo.